
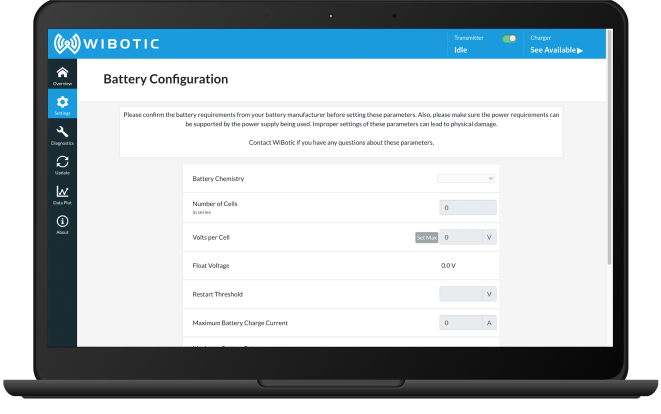
Adjust charge settings on the fly
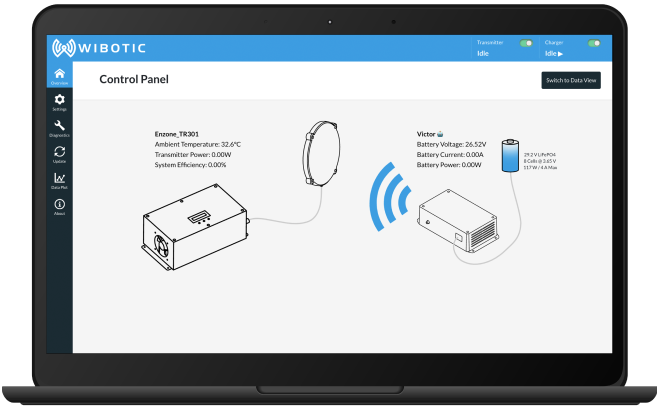
Once you’re set up with our charger hardware, our Control Panel software allows you to adjust charge settings across a diverse fleet with different battery chemistries, voltage, and current needs.
Since our software is accessible via any secure web browser, settings can be changed remotely and on-demand.
Utilize our API to fit your needs
We built our system to help you maximize flexibility and productivity with two kinds of APIs: a “Network API”, and an “Onboard API”.
• The Network API allows computers on the same network as the transmitter to monitor charging and set desired charging parameters.
• The Onboard API does the same thing, except that it allows the robot or drone controller to access the Onboard Charger directly to perform the same functions.
Both APIs allow you to flexibly implement our software into yours.

Keep track of battery health with
charge cycle logs
One major aspect of maintaining good battery health is keeping track of charge cycles. The Control Panel autonomously logs charge cycles up to the most recent 100 battery charges. Access to this historical data log allows you the ability to analyze data to help diagnose problems, predict when preventative maintenance needs to be scheduled, and help reduce downtime costs.
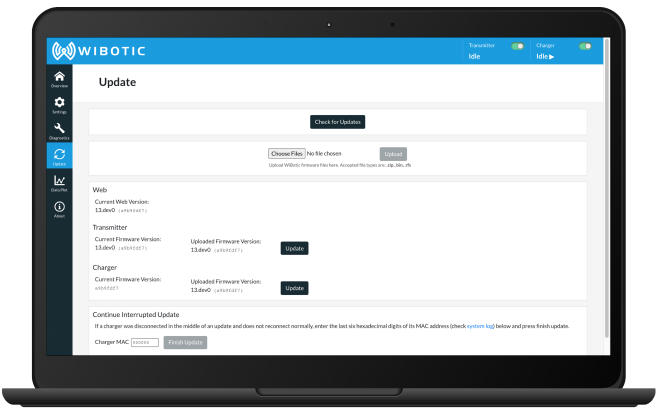
Over-the-air firmware updates
Wireless is kinda our thing, so when a firmware update is available, you’ll be able to do so at the touch of a button. No wires needed.
Pick up a System
All our wireless systems come with the Control Panel